学会活動
研究室で参加した学会等の様子を掲示していきます
2026年度
2026年6月30日-7月01日
ロボティクス・メカトロニクス 講演会 2026
福岡国際会議場
福岡国際会議場
カプセル型パーソナルスペースを用いたDWAによる歩行者回避
久保侑生,日高浩一
久保侑生,日高浩一
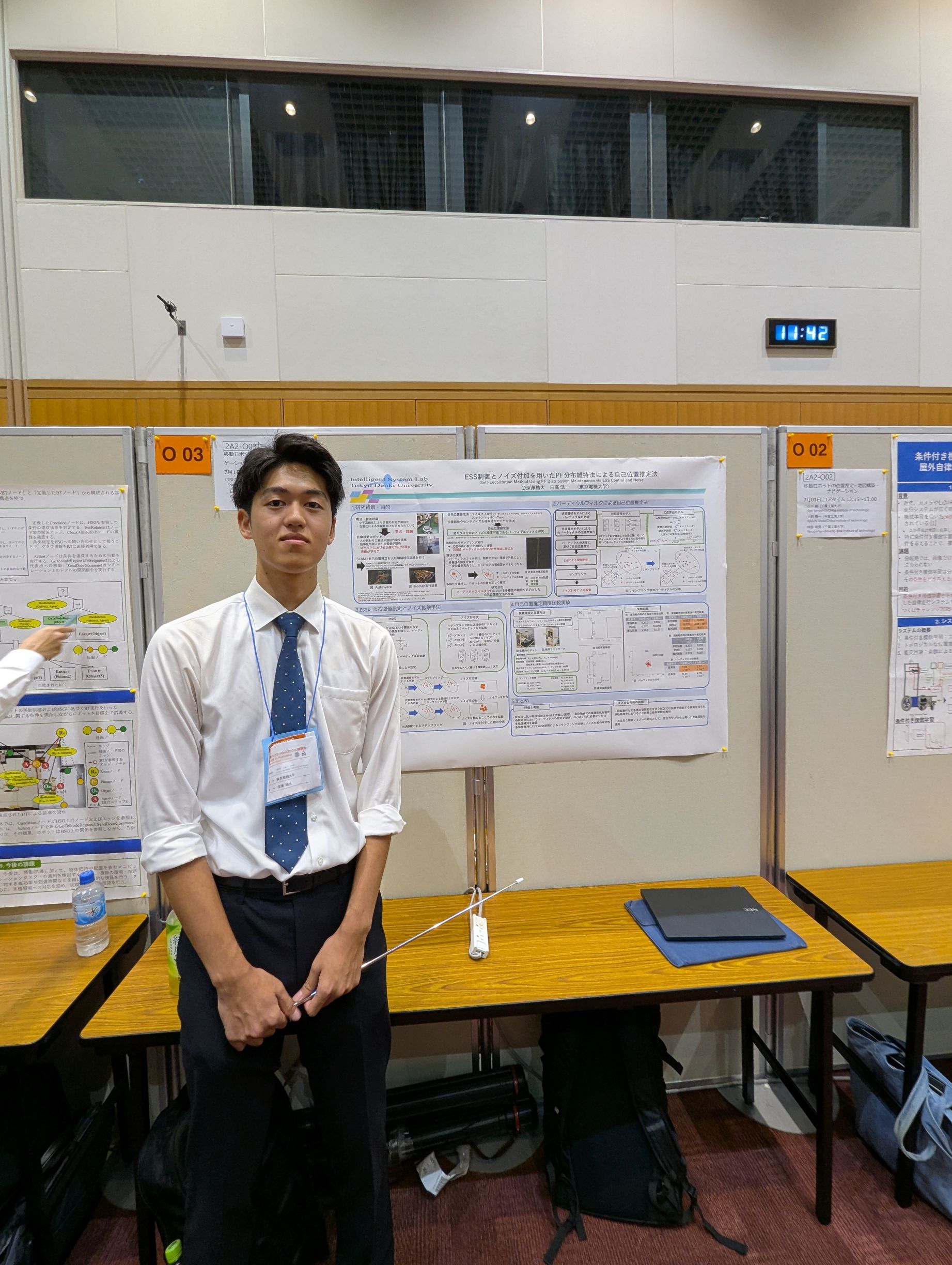
ESS制御とノイズ付加を用いたPF分布維持法による自己位置推定法
深澤皓大,日高浩一
深澤皓大,日高浩一
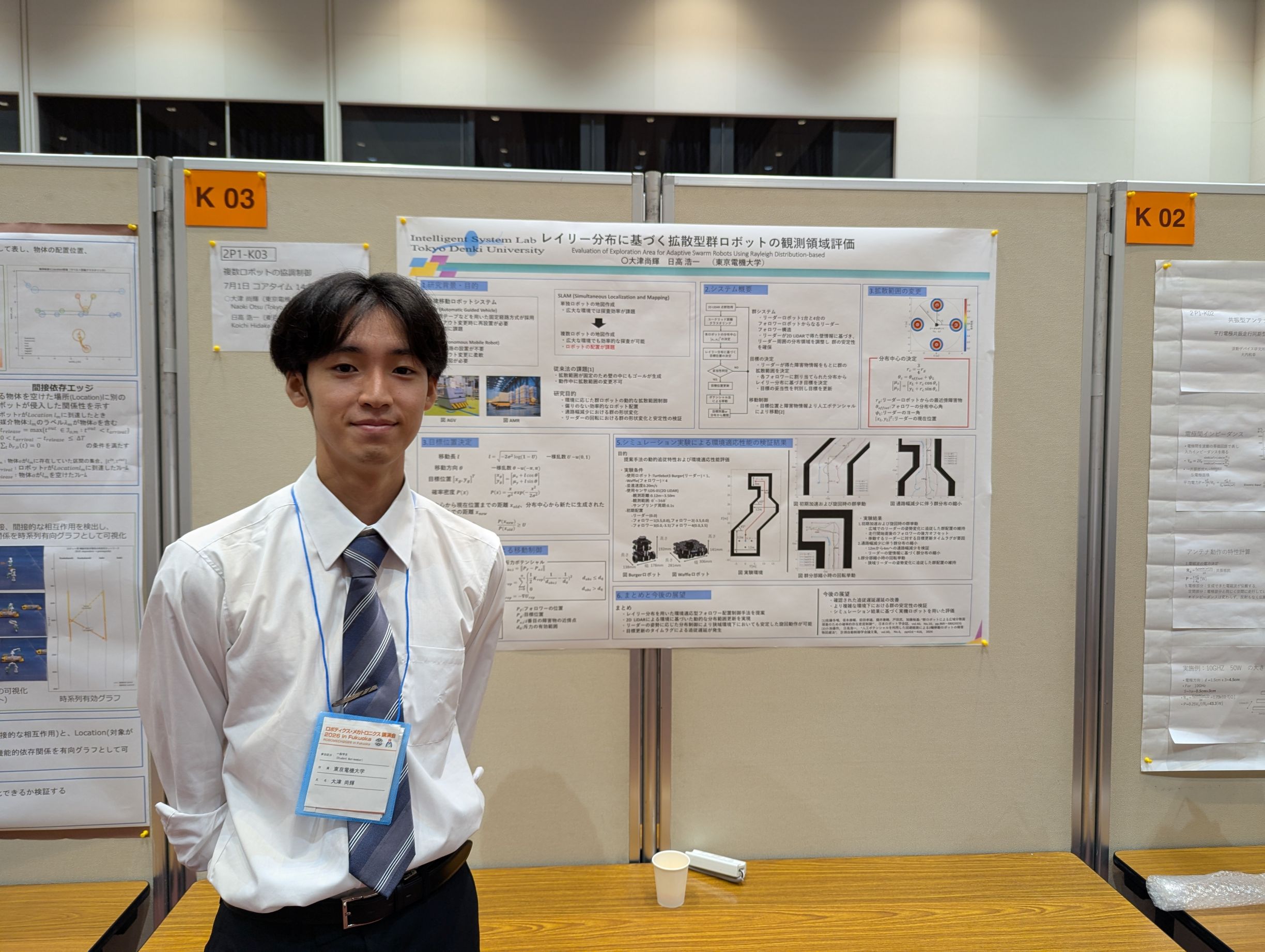
レイリー分布に基づく拡散型群ロボットの観測領域評価
大津尚輝, 日高浩一
大津尚輝, 日高浩一
ロボティクス・メカトロニクス講演会 2026でM1大津君、久保君および深澤君が卒業研究をまとめた内容で研究発表を行いました。

2025年度

2025年度修士修了学生。卒業おめでとう。
2025年12月10日 - 12月12日
第26回SICEシステムインテグレーション部門講演会(SI2025)
広島国際会議場
広島国際会議場
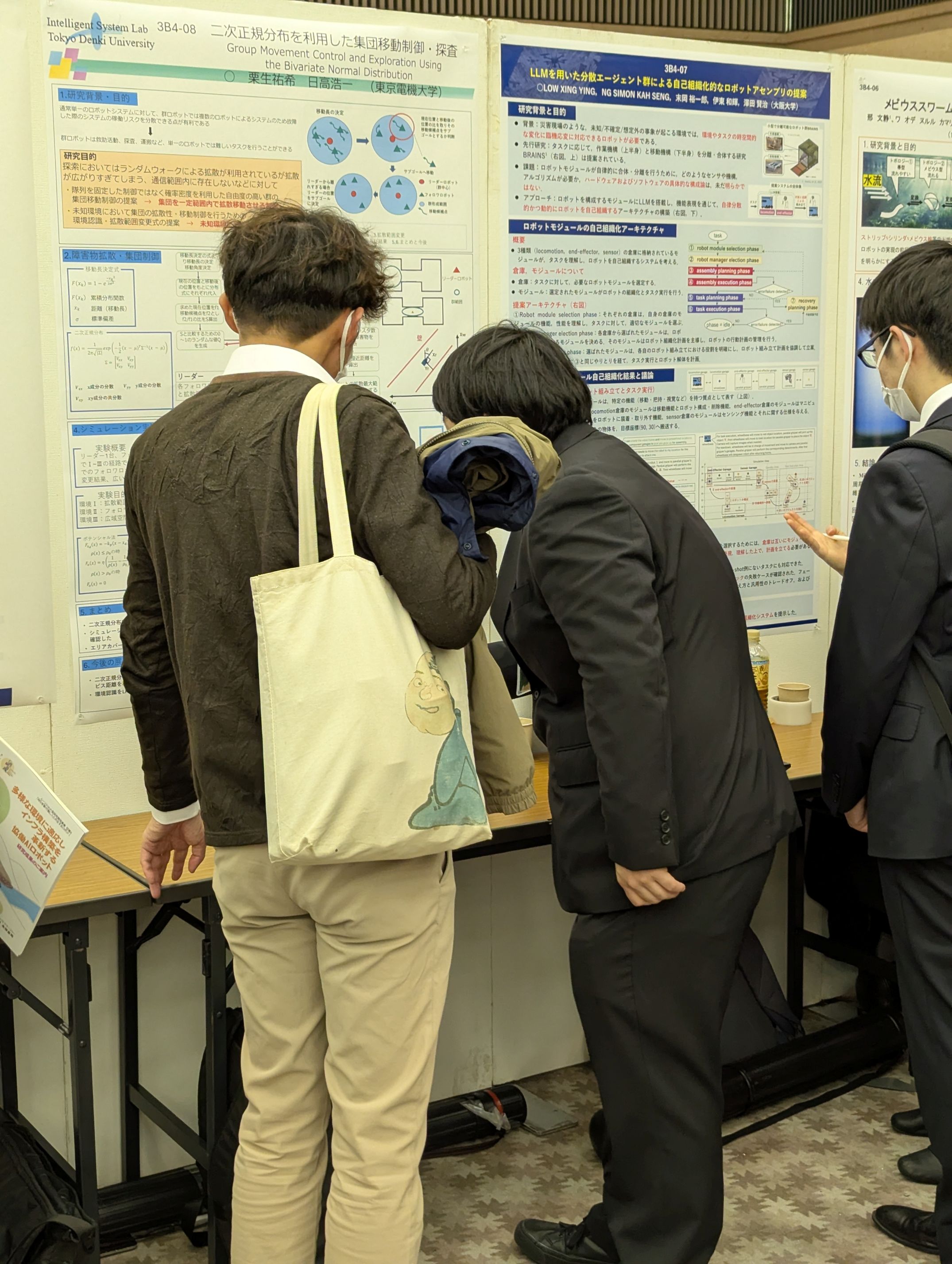
二次正規分布を利用した集団移動制御・探査
栗生 祐希,日高 浩一,pp.3785-3789.
栗生 祐希,日高 浩一,pp.3785-3789.
遠近地図データ同時観測での尤度変更と改良リサンプリングによるPF自己位置推定精度改善の検討
山口 慶純,日高 浩一,pp.4544-4547.
山口 慶純,日高 浩一,pp.4544-4547.
第26回SI2025でM2栗生君と山口君が研究発表を行いました。今回は広島で開催されたSI2025にてポスター形式で発表を行いました。同じ研究分野の方や他分野の方と意見交換を行うことで新しい取り組み方などが見えてくる有意義な時間となりました。学会の参加は今回で4回目となりポスター形式での発表でした。今回の発表では新たな研究の課題が見つかりとても有意義な時間になりました。特に今後尤度関数を変更する優位性やGAの必要性などは再度振り返る必要があり今後の研究につなげたいと考えています。




2025年11月1日 - 11月2日
第68回自動制御連合講演会
名古屋大学 東山キャンパス
名古屋大学 東山キャンパス
SOC非線形性を取り込んだMPCによるハイブリッド車の燃費改善制御
方波見 祐太,日高 浩一,pp.1593-1598.
方波見 祐太,日高 浩一,pp.1593-1598.
人間の操縦を考慮した群ロボット制御法
吉田 侑生,日高 浩一,pp.1721-1723.
吉田 侑生,日高 浩一,pp.1721-1723.
第68回自動制御連合講演会でM2方波見君とM1吉田君が研究発表を行いました。方波見君の発表はハイブリット自動車のエネルギーマネージメントでした。従来の燃費性能向上だけでなく、電池残量を考慮した場合の燃費とSOCのトレードオフの検討結果および、SOCを考慮した低燃費を達成させるMPCの評価関数の提案とシミュレーション結果を発表しました。発表内容に興味を持っていただき、複数の質問がありました。吉田君の発表セッション「人が関わるシステムのモデル化・解析・制御」では、群集挙動モデルとその流動性の評価、人流追従を考慮した順応した自律走行や人間モデリングと受動性解析など、人とシステムの融合システムの設計解析結果のセッションでの発表でした。聴衆から2件と司会者から1件の質問コメントがありました。



2025年10月31日
産業計測制御研究会
慶應大学新川崎キャンパス
慶應大学新川崎キャンパス
パーティクルフィルタを用いた自己位置推定でのパラメータ最適化に関する研究
深澤 皓大, 日高浩一(4ページ)
深澤 皓大, 日高浩一(4ページ)
群ロボットのレイリー拡散を使用した観測領域の拡張性能評価
大津 尚輝,日高 浩一(4ページ)
大津 尚輝,日高 浩一(4ページ)
電気学会D部門研究会「センシング+AIとコントロールシステム技術の応用」で深澤君と大津君が研究発表を行いました。質問とともに複数の先生方から研究内容や実験状況などに対して大変有益なコメントをいただきましたので、ぜひ今後の研究を実施していくときの参考にしてもらいたいと思います。研究会後に開催した懇親会で他大学の学生さんと交流もしました。



2025年9月3日 - 9月5日
第43回日本ロボット学会学術講演会
東京科学大学 大岡山キャンパス
東京科学大学 大岡山キャンパス
室内環境における建築物構造特徴線を利用した自己位置推定精度向上法の検討
橋本鵬弘, 日高浩一,2ページ, 2025.
橋本鵬弘, 日高浩一,2ページ, 2025.
ロボット学会、自己位置推定のセッションで橋本君が発表を行いました。参加者から提案する構造線を利用するStructure SLAMは多くの論文が発表されているので、関連文献を調べることが重要であるとのコメントや、構造線の位置を中心点にする理由および縦線のみを利用する理由などの質問がありました。今回の参加者の延べ人数は1600人であることが、懇親会で発表がありました。また懇親会会場は目黒の雅叙園で行われました。



2025年8月19日 - 8月22日
電気学会D部門大会 / 産業計測制御研究会
徳島大学 常三島キャンパス
徳島大学 常三島キャンパス
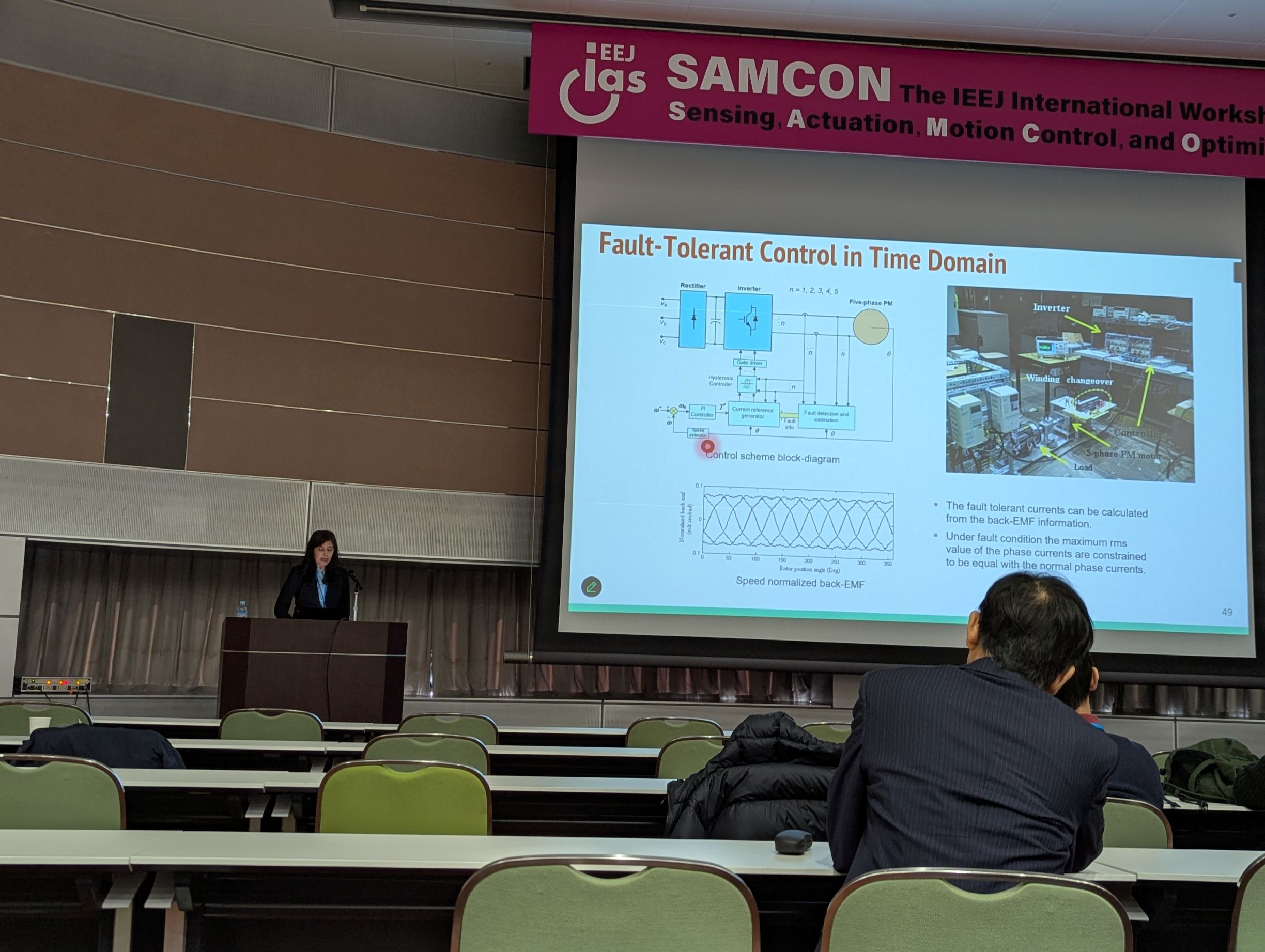
移動環境を利用する人工ポテンシャルによる静止移動障害物回避法,シンポジウムセッション
日高浩一
日高浩一
運転動作データに基づく短時間未来車速予測モデル設計法
日高浩一(産業計測制御研究会)
日高浩一(産業計測制御研究会)
SOCモデルを考慮した非線形MPCによるHEVの燃費最適化制御
方波見裕太, 日高浩一(産業計測制御研究会)
方波見裕太, 日高浩一(産業計測制御研究会)
電気学会D部門大会最終日午前中に開催されたシンポジウムセッションS8「データに基づくスマートセンシングとシステムインテグレーション技術への展開」で日高が発表を行いました。参加者から活発な質疑があり盛り上がったSSであったと思います。翌日の8月22日には、D部門 産業計測制御研究会で方波見君および日高が発表しました。
2025年6月4日 - 6月6日
ロボットメカトロニクス講演会2025(ROBOMECH)
山形ビッグウイング
山形ビッグウイング
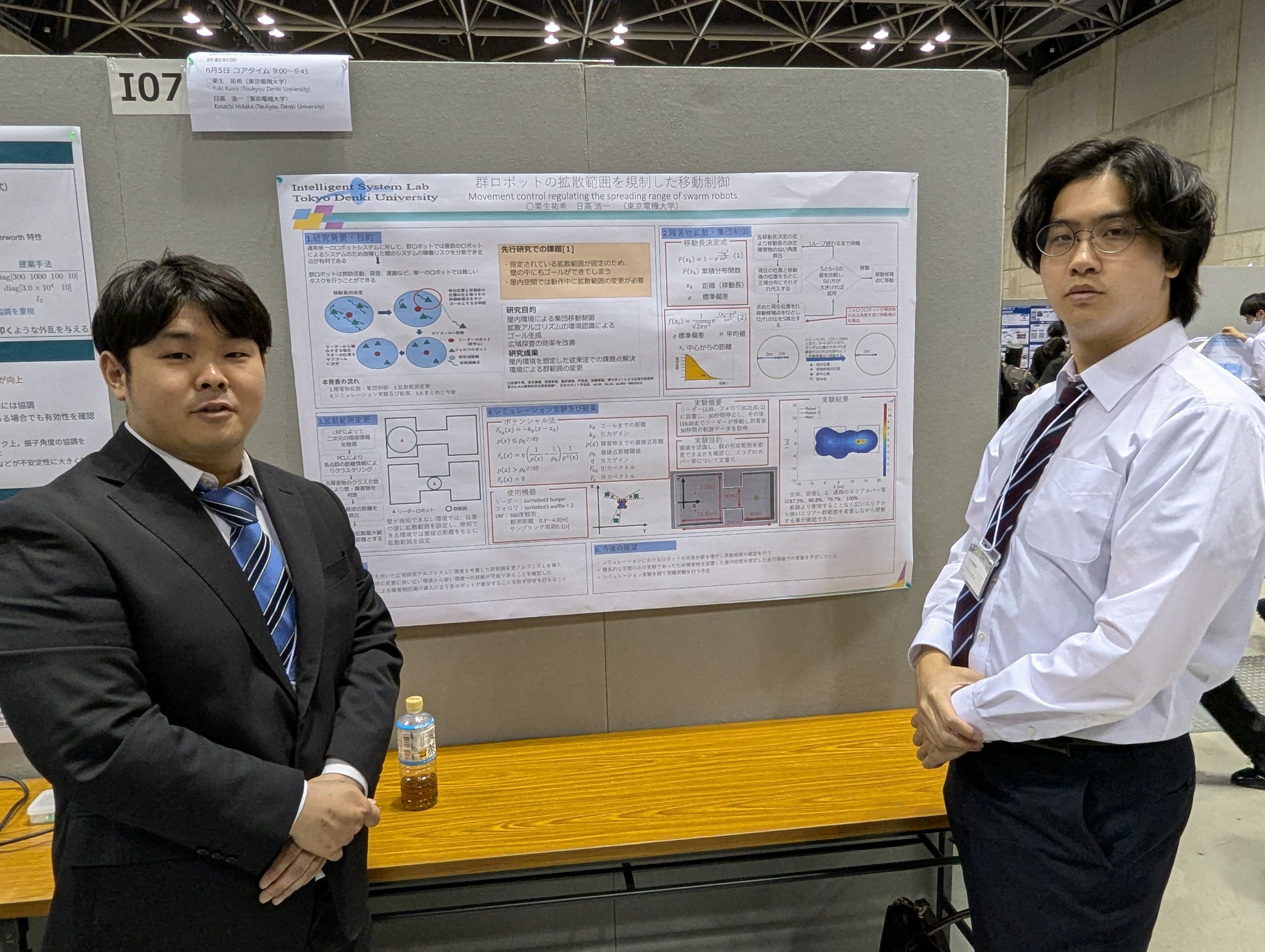
群ロボットの拡散範囲を規制した移動制御,1A1-I07
栗生祐希,日高浩一
栗生祐希,日高浩一
遠近同時観測での尤度変更によるPF自己位置推定精度改善に対する検討,2A1-P07
山口慶純,日高浩一
山口慶純,日高浩一
今回は山形で開催されたロボティクス・メカトロ二クス講演会に参加してポスター形式で発表を行いました。初めてのポスター発表と言うこともありいつもと違う環境に少し緊張していましたが、多くの質問や意見を頂くことができたためとても有意義な時間になりました。同じ研究分野の方や他分野の方と意見交換を行うことで現在の研究課題、新しい取り組み方などが見えてくる有意義な時間となりました。


2025年5月25日 - 5月27日
第69回システム制御情報学会研究発表講演会
神戸市産業振興センター
神戸市産業振興センター
燃費改善のための一次遅れ系応答を用いたアクセル動作補助システムの検討
広辺 恒, 日高浩一
広辺 恒, 日高浩一
2025年3月21日 - 3月23日
11th IEEJ International Workshop on SAMCON2025
松江 くにびきホール
松江 くにびきホール
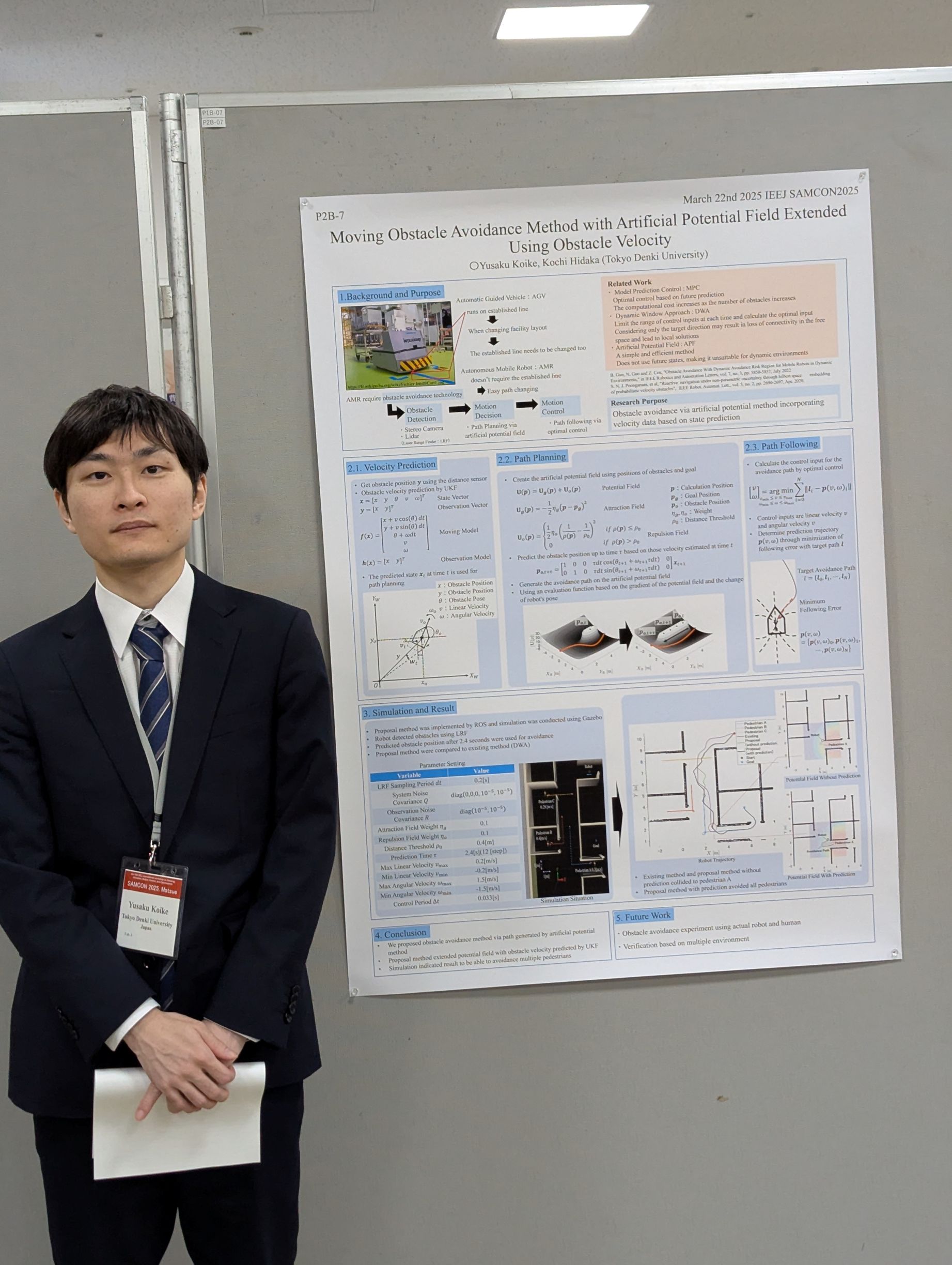
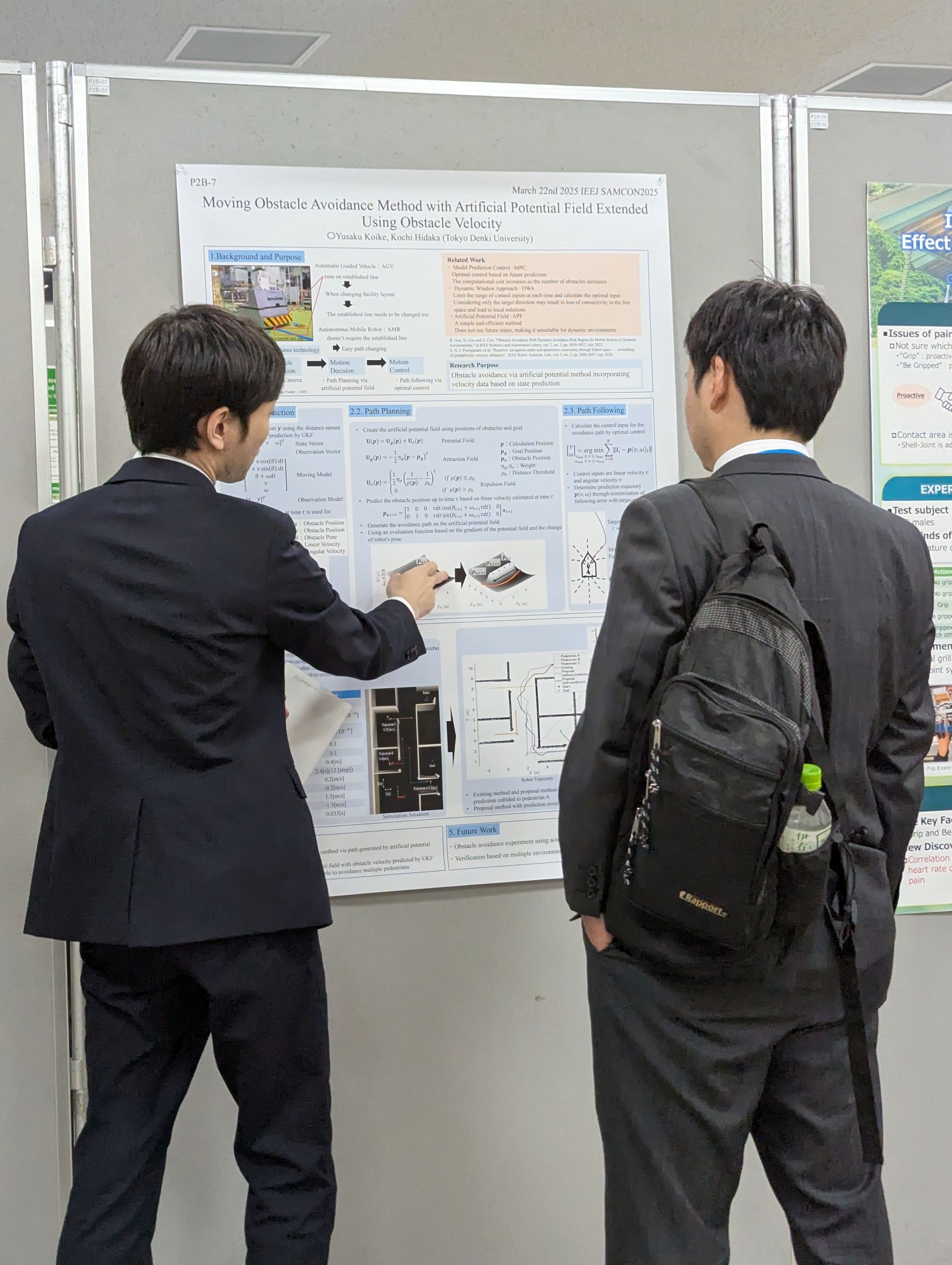
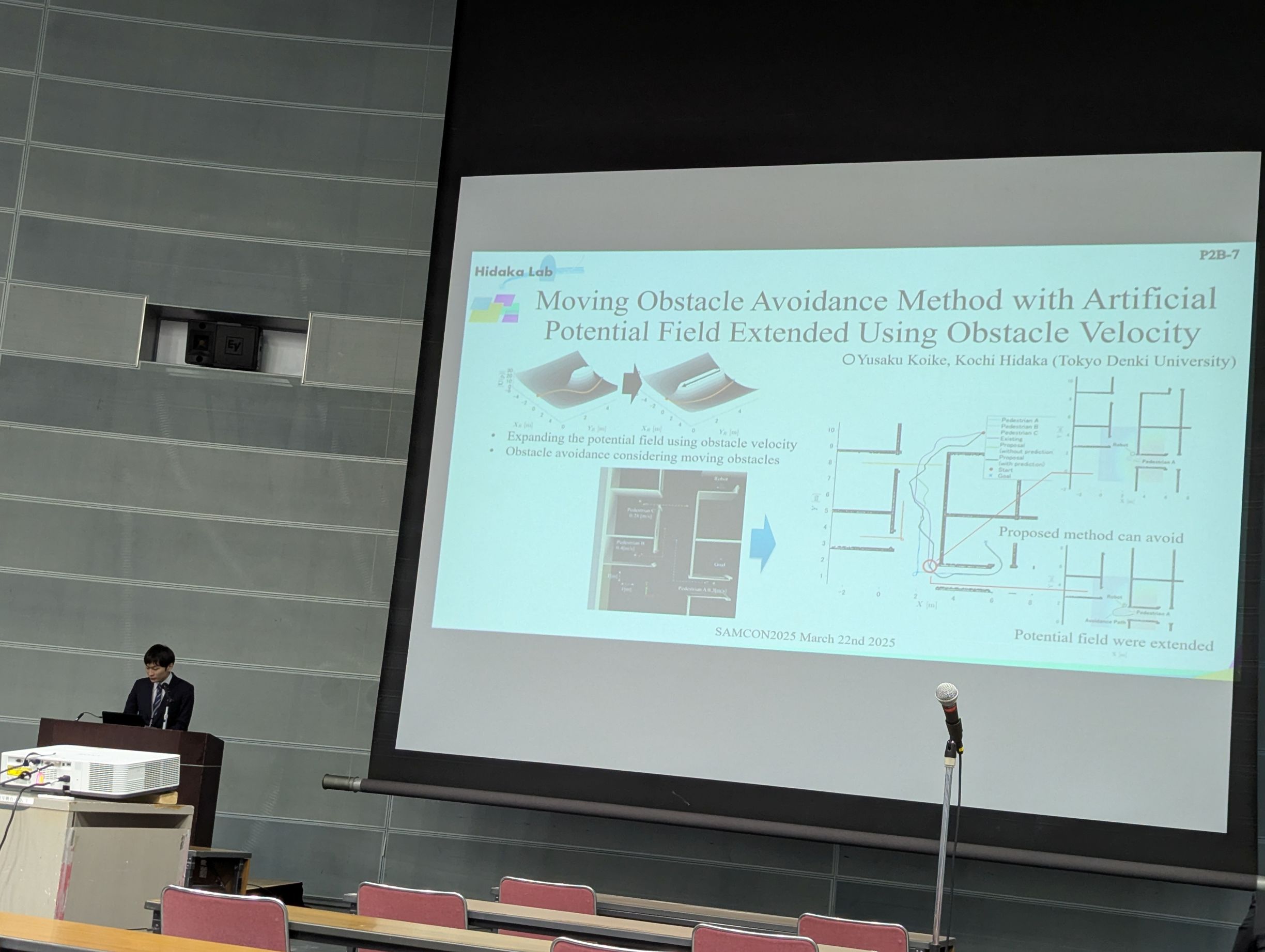
Moving Obstacle Avoidance Method with Artificial Potential Field Extended Using Obstacle Velocity
Yusaku Koike, Koichi Hidaka. IEEJ SAMCON'25, pp.342-346, 2025.
Yusaku Koike, Koichi Hidaka. IEEJ SAMCON'25, pp.342-346, 2025.
電気学会D部門大会が主催する国際会議のSAMCON2025で小池君が上記のタイトル論文でポスター発表を行いました。内容は修士論文の主結果である、廊下等の移動幅制限上での移動ロボットが複数歩行者を回避可能とする制御法の結果です。複数の先生方からのコメントや指摘をいただいたようです。小池君にとって学生最後の発表でした。


2025年3月18日 - 3月20日
令和7年電気学会全国大会
明治大学 中野キャンパス
明治大学 中野キャンパス
構造線情報を利用する自己位置推定精度向上法の提案
橋本鵬弘,日高浩一,令和7年電気学会全国大会,pp.144-145,2025.
橋本鵬弘,日高浩一,令和7年電気学会全国大会,pp.144-145,2025.
マルチエージェントの合意形成制御
吉田侑生,日高浩一,令和7年電気学会全国大会,pp.146-147, 2025.
吉田侑生,日高浩一,令和7年電気学会全国大会,pp.146-147, 2025.
令和7年電気学会全国大会の「ロボット・バイオニクス(1)」で橋本が発表を行いました。規模の大きい学会に参加するのは初めての経験であったため、とても緊張しました。質疑応答では、「計算量が多いため実機を実際に使用した際に処理が重いのではないか」という意見をいただきました。他の方々の発表もたくさん聞くことが出来た充実した2日間でした。吉田の発表でも、大規模な学会への参加は今回が初めてであり、他大学や企業の研究を聞くことが出来て今後の研究の参考になりました。
2024年
2024年12月18日 - 12月20日
計測自動制御学会システムインテグレーション学術講演会(SI2024)
アイーナ いわて県民情報交流センター
アイーナ いわて県民情報交流センター
障害物予測速度情報を加えた人工ポテンシャル場に基づく回避経路作成法
小池優作,日高浩一,第25回計測自動制御学会SI,pp.1189-1192,2024.
小池優作,日高浩一,第25回計測自動制御学会SI,pp.1189-1192,2024.
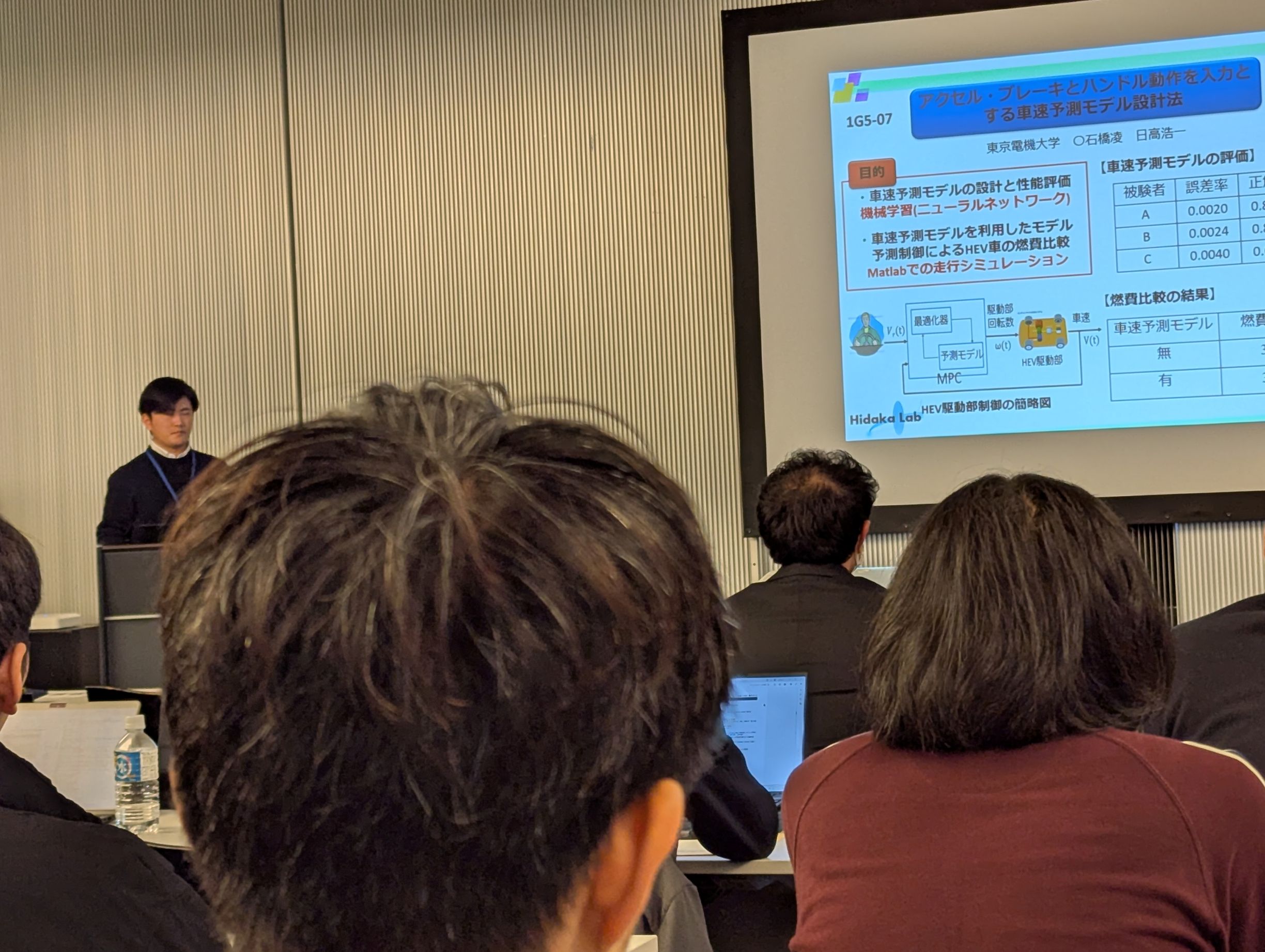
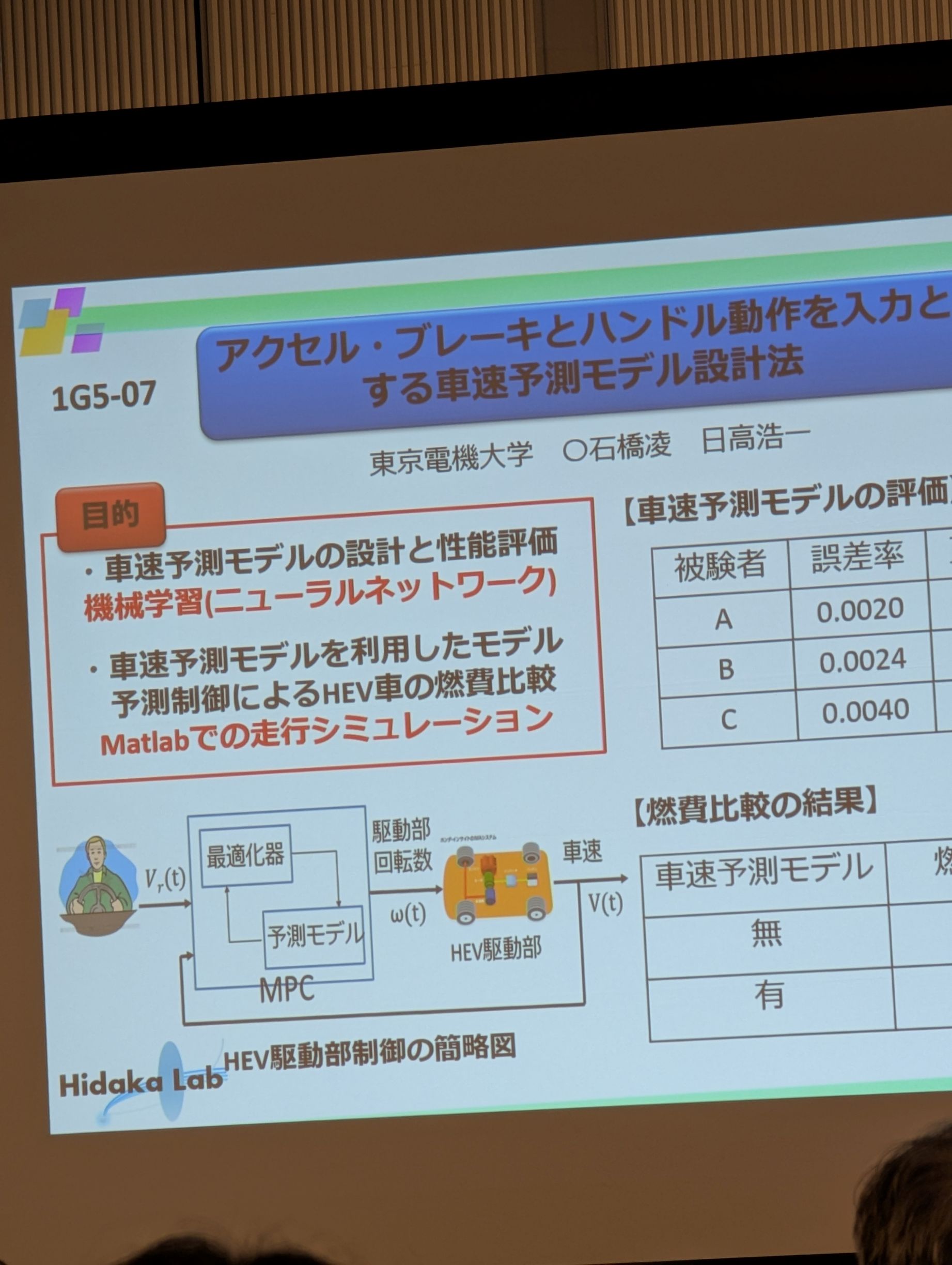
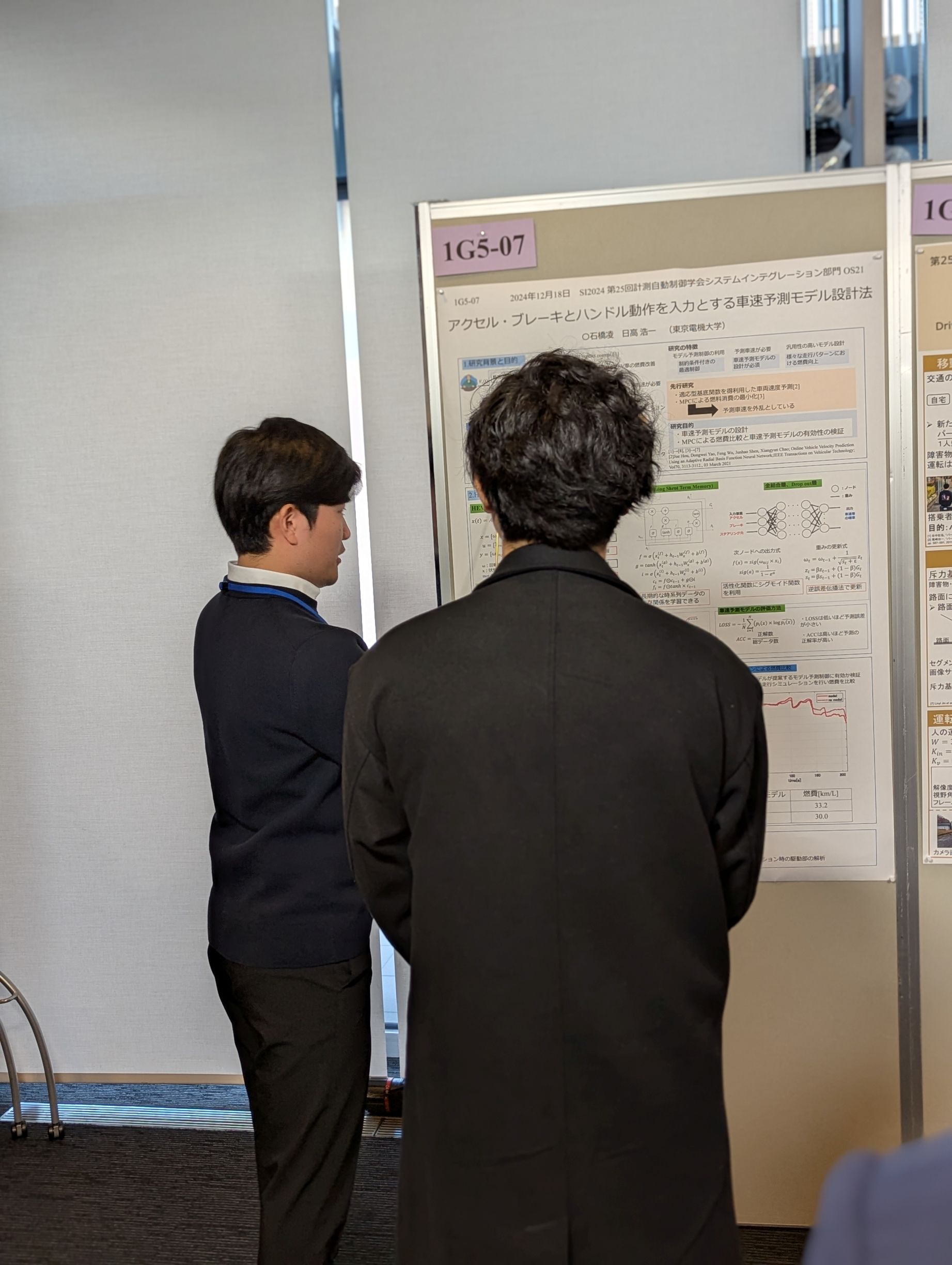
アクセル・ブレーキとハンドル動作データを入力とする機械学習を用いた車速予測モデル設計法
石橋凌,日高浩一,第25回計測自動制御学会SI,pp.1436-1439,2024.
石橋凌,日高浩一,第25回計測自動制御学会SI,pp.1436-1439,2024.
修士2年の小池君、石橋君がポスター発表を行いました。SIはすべてポスター形式での発表のため、多くの聴講者と密な議論ができる学会であり毎年参加をしています。盛岡は外は晴天でもとても寒く感じましたが、SI会場内は暑すぎず寒すぎないちょうどよい温度調整でした。また会場から積雪している岩手山がよく見ることが出来ました。




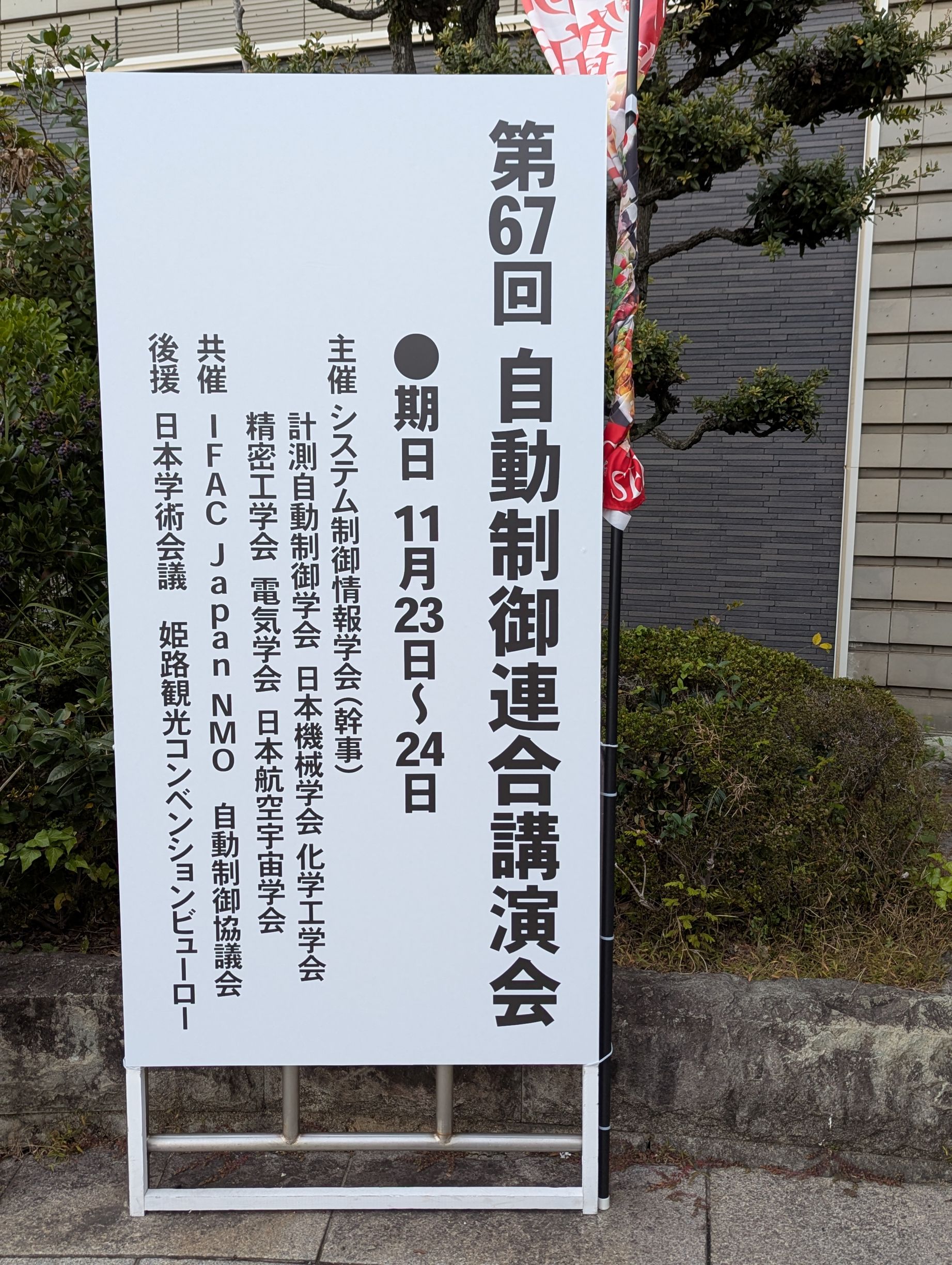
2024年11月23日 - 11月24日
第67回自動制御連合講演会
姫路商工会議所
姫路商工会議所
パーティクルフィルタでの遠距離地図データ観測時における尤度関数変更法による性能評価のためのシミュレーション開発
山口慶純,日高浩一,第67回自動制御連合講演会,pp.691-696,2024.
山口慶純,日高浩一,第67回自動制御連合講演会,pp.691-696,2024.
自動制御連合講演会の初日午後の「自己位置推定」セッションで発表を行いました。修士1年の山口君が発表予定でしたが、体調不良で参加できなくなったことから第2著者が急遽発表を行いました。午前、午後面白くかつ参考となる発表が多数あり有益な参加であったと思っています。


2024年11月3日 - 11月6日
The 2024 Annual Conference of the IEEE Industrial Electronics Society (IECON)
Chicago, USA
Chicago, USA
Moving Obstacle Avoidance with Potential Function Using Estimated Velocity of Obstacle
Yusaku Koike, Koichi Hidaka. 6ページ, 2024.
Yusaku Koike, Koichi Hidaka. 6ページ, 2024.
IECON2024(シカゴ・USA)でM2小池君が移動障害物回避法に関する研究発表をスペシャルセッション(SS)で行いました。セッション会場は日本、中国、USA、UK等の大学、企業所属の20名程度の聴講者がおり、小池君の発表に対しても聴講者から質問がありました。小池君にとって査読あり英語での国際学会発表経験を今後の活動に生かしてもらえればと思っています。




2024年10月29日 - 11月1日
The International Conference on Control, Automation, and Systems (ICCAS)
Jeju, Korea
Jeju, Korea
Vehicle Speed Prediction Model Using Neural Network for Model Predictive Control Depending on Future Prediction
Ryo Ishibashi, Koichi Hidaka. pp.377-382, 2024.
Ryo Ishibashi, Koichi Hidaka. pp.377-382, 2024.
ICCAS2024(韓国・済州島)でM2石橋君が運転車速の予測モデルに関する研究発表をAutonomous Vehicle Systemsのセッションで行いました。石橋君にとって、査読あり英語での国際学会発表は初めてでした。この経験を今後の活動に生かしてもらえればと思っています。





2024年9月4日 - 9月6日
第42回日本ロボット学会学術講演会(大阪工業大学)
電気学会C部門大会(近畿大学)
電気学会C部門大会(近畿大学)
M2小池君、M1山口君が日本ロボット学会学術講演会で、M1方波見君が電気学会C部門大会でそれぞれ研究発表を行いました。初めての学会発表ということもあり、大勢の前で発表することに対しては緊張もありましたが、研究に対していくつか助言も頂きとても良い経験になったと思います。






